

Embora os circuitos de controle remoto de um quadricóptero possam ser facilmente adquiridos no mercado ou em qualquer loja on-line, um ávido amador eletrônico nunca tem permissão para aprender como realmente funcionam e se podem ou não ser construídos em casa?
Neste artigo, tentaremos construir um circuito simples de controle remoto quadcopter usando componentes discretos e usando módulos de controle remoto RF, e sem envolver os complexos circuitos baseados em MCU.
O guia passo a passo realmente fará com que os entusiastas interessados entendam como simplesmente um quadcopter pode ser controlado usando um conceito PWM.
Já aprendemos o básico do quadcopter, agora vamos investigar a seção de controle remoto que ajudará a pilotar a unidade remotamente.
Módulos básicos necessários
Os principais ingredientes que podem ser necessários para o projeto são fornecidos como abaixo:
Vamos exigir fundamentalmente os seguintes 3 estágios de circuito:
1) controle remoto RF de 4 vias Tx, módulos Rx – 1 conjunto
2) Circuitos geradores PWM baseados em IC 555 – 4nos
3) Circuitos do controlador do motor BLDC – 4nos
Por se tratar de uma versão caseira, podemos esperar algumas ineficiências com o design proposto, como a ausência de joysticks para os controles, que são substituídos por potes ou potenciômetros, porém a capacidade de trabalho do sistema pode estar no mesmo nível da unidades profissionais.
A unidade transmissora PWM portátil consistirá basicamente no módulo remoto Tx integrado com 4 circuitos de controle PWM discretos, enquanto o quadcopter precisará ser fechado com 1 circuito Rx integrado com 4 circuitos de driver BLDC discretos.
Vamos começar com os circuitos do motor quadcopter e ver como o controlador do motor BLDC precisa ser configurado e conectado ao circuito Rx.
Circuito Receptor Quadcopter PWM
Em um dos posts anteriores, aprendemos como um controlador de motor BLDC versátil pode ser construído usando um único chip, no entanto, este projeto não foi projetado para operar motores relativamente mais pesados de um quadricóptero, portanto, pode não ser adequado para a presente aplicação.
Felizmente, uma opção “big brother” para o circuito acima está disponível e se torna perfeitamente adequada para acionar motores quadcopter. Obrigado à TEXAS INSTRUMENTS, por nos fornecer esses maravilhosos módulos de circuito especificados para aplicações de chip único.
Para saber mais sobre este IC de driver BLDC de alta corrente, você pode consultar a seguinte folha de dados em pdf do mesmo
https://www.homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
A configuração abaixo mostra o esquema completo do circuito do controlador do driver do motor quadcopter usando o DRV11873 IC, que é um circuito de motor BLDC de baixa corrente independente que consiste em todos os recursos de proteção necessários, como proteção contra sobrecarga, proteção térmica, etc. Este módulo basicamente forma o ESC para a nossa unidade quadcopter atual.
Para mais informações sobre este design e detalhes do PCB, você pode consultar o documento original abaixo:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Como funciona
As pinagens FS e FG do IC são para aprimorar o IC com controles adicionais através de circuitos externos, já que não estamos usando esses recursos em nosso projeto, esses pinos podem ser mantidos sem uso e terminados na linha positiva através de um resistor de 100K.
A pinagem RD do IC decide o sentido de rotação do motor. Conectar este pino ao Vcc através de um resistor de 100K permite uma rotação no sentido anti-horário do motor enquanto deixá-lo desconectado faz o contrário e permite que o motor gire no sentido horário.
O pino 16 é a entrada PWM usada para injetar uma entrada PWM de uma fonte externa, variando o ciclo de trabalho do PWM altera a velocidade do motor correspondentemente.
As pinagens FR, CS também são irrelevantes para nossa necessidade e podem, portanto, ser deixadas sem uso, conforme mostrado no diagrama, e terminadas na linha positiva através de um resistor de 100K.
As pinagens U, V, W são as saídas do motor que precisam ser conectadas com o respectivo motor trifásico quadcopter BLDC.
A pinagem COM é para conectar o fio comum do motor trifásico, se o seu motor não tiver um fio comum, você pode simplesmente simulá-lo conectando 3 nos de resistores de 2k2 aos pinos U, W, W e depois juntar seus pinos comuns. termina com o pino COM do IC.
O esquema também mostra um IC 555 configurado no modo de circuito astável PWM. Isso se torna uma parte do módulo do circuito e a saída PWM de seu pino 7 pode ser vista conectada à entrada PWM do circuito DRV IC para iniciar os 4 motores com uma velocidade base constante e permitir que o motor paire constante velocidade em um determinado ponto.
Isso conclui o circuito ELC principal ou o circuito do driver BLDC para o projeto do quadricóptero.
Precisaremos de quatro desses módulos para os quatro motores em nosso projeto de quadricóptero.
Ou seja, 4 desses DRV IC juntamente com o estágio IC 555 PWM precisarão ser associados a cada um dos 4 motores do quadricóptero.
Esses módulos garantirão que normalmente todos os 4 motores sejam ajustados em uma velocidade predeterminada, aplicando um sinal PWM fixo e idêntico a cada um dos CIs do controlador DRV relevante.
Agora vamos aprender como o PWM pode ser alterado através de um controle remoto para alterar as velocidades do motor individual usando um controle remoto comum de 4 canais.
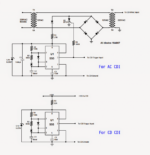
O Módulo Receptor RF (Descodificador PWM)

O circuito acima mostra o circuito de RF remoto do receptor que deve ser acomodado dentro do quadcopter para receber dados PWM sem fio externos do aparelho transmissor remoto do usuário e, em seguida, processar os sinais adequadamente para alimentar os módulos controladores DRV que acompanham, conforme explicado no seção anterior.
As 4 saídas nomeadas como PWM#1….PWM#4 precisam ser conectadas com o pino PWM#15 do DRV IC conforme indicado no diagrama anterior.
Essas pinagens PWM da unidade receptora de RF são ativadas sempre que o botão correspondente é pressionado pelo usuário em seu fone transmissor.
Como o transmissor de RF precisa ser conectado (codificador PWM)
Na seção acima, discutimos o Rx ou o circuito do receptor remoto e como suas 4 saídas precisam ser conectadas aos módulos de driver ESC do motor quadcopter.
Aqui vemos como o transmissor de RF simples precisa ser criado e conectado com circuitos PWM para transmitir os dados PWM sem fio para a unidade receptora do quadcopter, de modo que as velocidades do motor individual sejam controladas simplesmente pressionando um botão, o que acaba causando o quadcopter para mudar de direção ou sua velocidade, conforme as preferências dos usuários.

O circuito mostrado acima exibe os detalhes da fiação do módulo transmissor. A ideia parece bem simples, o circuito transmissor principal é formado pelo chip TSW434 que transmite os sinais PWM codificados para a atmosfera, e o HT12E que se torna responsável por alimentar os sinais codificados no chip TSW.
Os sinais PWM são gerados por 4 estágios de circuito IC 555 separados que podem ser idênticos ao que foi discutido anteriormente no módulo controlador DRV.
O conteúdo PWM dos 4 ICs pode ser visto terminado nas respectivas pinagens do codificador IC HT12E através de 4 botões discretos indicados como SW1—-SW4.
Cada um desses botões corresponde e alterna a pinagem idêntica do módulo receptor que discutimos anteriormente e indicamos como PWM#1, PWM#2…..PWM#4.
O que significa que pressionar SW1 pode fazer com que a saída PWM#1 da unidade receptora seja ativada e esta pinagem começará a alimentar os sinais PWM decodificados recebidos do transmissor para o módulo DRV associado e, por sua vez, fará com que o motor relevante altere sua velocidade de acordo.
Da mesma forma, pressionar SW2,3,4 pode ser usado para influenciar as velocidades dos outros 3 motores quadcopter conforme o desejo do usuário.
Circuito PWM IC 555
Os 4 circuitos PWM mostrados no aparelho transmissor de RF acima podem ser construídos consultando o diagrama a seguir, que é exatamente semelhante ao que foi visto no circuito ESC do controlador DRV.

Por favor, lembre-se que o potenciômetro de 5K pode estar na forma de um potenciômetro usual e este potenciômetro pode ser usado adicionalmente com os botões para selecionar diferentes velocidades nos motores correspondentes.
Ou seja, mantendo um botão selecionado pressionado e movendo simultaneamente o 5KPWMpot correspondente, pode-se fazer com que o quadcopter aumente ou diminua sua velocidade na direção pretendida.
Alternativamente, o PWM pode ser inicialmente definido em algum nível superior ou inferior e, em seguida, o botão correspondente pressionado para permitir que o motor do quadricóptero correspondente atinja a velocidade preferida, conforme a configuração do PWM.
Especificação do Motor Quadcopter
O circuito de controle remoto Qiadcopter explicado acima deve ser usado apenas para fins de exibição e não pode ser usado para levantar cargas ou uma câmera. Isso implica que os motores utilizados no projeto devem ser preferencialmente do tipo de baixa corrente.
O DRV11873 IC foi projetado para operar motores de 15V, 1,5 amps ou cerca de 20 watts… de modo que qualquer motor BLDC trifásico de 15 a 30 watts pode ser usado para essa finalidade.
A bateria para este projeto de quadricóptero pode ser qualquer bateria Lipo pr Li-ion de 12V capaz de fornecer 15V de pico a 1,5 amperes de corrente contínua.
Detalhes da especificação
Motor DC miniatura Outrunner sem escova 1306N
Tipo: Micromotor
Construção: Ímã Permanente
Comutação: sem escova
Velocidade (RPM): 2200 rpm/v
Corrente Contínua (A): 1,5~2,6A
Voltagem (V): 7,4~11,1V
motor CC miniatura: AX-1306N
peso: 8g
diâmetro do eixo: 1,5 mm
Bateria LI-PO: 2-3s
corrente de operação: 1,5 ~ 2,6 A
eficiência máxima: 67%

Hashtags: #Circuito #controle #remoto #Quadcopter #sem #MCU
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários