Neste post vamos aprender sobre um circuito simples que permite um recurso de ajuste manual para o ponto de ignição do CDI de uma motocicleta para obter uma ignição antecipada, ignição retardada ou simplesmente uma ignição temporizada normal.
Após um estudo abrangente sobre o assunto, aparentemente tive sucesso em projetar este circuito que pode ser usado por qualquer motociclista para obter maior velocidade e eficiência de combustível, ajustando o ponto de ignição do motor do veículo conforme desejado, dependendo de sua velocidade instantânea.
Tempo de ignição de ignição
Todos sabemos que o momento da faísca de ignição gerada dentro de um motor de veículo é crucial em termos de eficiência de combustível, vida útil do motor e velocidade do veículo, faíscas CDI mal cronometradas podem produzir um veículo com mau funcionamento e vice-versa.
O tempo de ignição recomendado para a faísca dentro da câmara de combustão é quando o pistão está cerca de 10 graus após ter cruzado o ponto TDC (Top Dead Center). A bobina de captação é ajustada para corresponder a isso e cada vez que o pistão chega pouco antes do TDC, a bobina de captação aciona a bobina CDI para disparar a faísca, denominada BTDC (antes do ponto morto superior.
A combustão feita com o processo acima geralmente produz um bom funcionamento do motor e emissões.
No entanto, o acima funciona bem apenas enquanto o motor estiver funcionando em alguma velocidade média recomendada, mas para motocicletas projetadas para atingir velocidades extraordinárias, a ideia acima começa a funcionar mal e a motocicleta é inibida de atingir as altas velocidades especificadas.
Sincronizando Spark Time com Velocidades Variadas
Isso acontece porque em velocidades mais altas o pistão se move muito mais rapidamente do que a faísca de ignição pode antecipar. Embora o circuito CDI inicie o acionamento corretamente, e tente complementar a posição do pistão, no momento em que a faísca consegue acender na vela, o pistão já percorreu muito à frente do TDC, causando um cenário de combustão indesejável para o motor. Isso, por sua vez, resulta em ineficiências, impedindo que o motor atinja seus limites de velocidade mais altos especificados.
Portanto, para corrigir o tempo de disparo da ignição, precisamos avançar um pouco o disparo da vela, comandando um gatilho ligeiramente avançado para o circuito CDI, e para velocidades mais lentas isso simplesmente precisa ser invertido e o disparo precisa ser preferencialmente ligeiramente retardado para permitindo a eficiência ideal para o motor do veículo.
Discutiremos todos esses parâmetros de maneira muito elaborada em algum outro artigo, no momento gostaríamos de analisar o método que nos permitiria obter um ajuste manual do ponto de ignição da ignição para avançar, retardar ou trabalhar normalmente conforme a velocidade da moto.
O tempo de coleta pode não ser confiável o suficiente
A partir da discussão acima, podemos concluir que o gatilho da bobina de captação não se torna confiável apenas para motocicletas de alta velocidade, e alguns meios de avançar o sinal de captação se tornam imperativos.
Normalmente isso é feito usando microcontroladores, tentei conseguir o mesmo usando componentes comuns, aparentemente parece ser um projeto logicamente viável, embora apenas um teste prático possa confirmar sua usabilidade.

Projetando um processador de retardo avançado CDI eletrônico
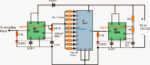
Referindo-se ao projeto acima do circuito de temporizador de retardo e avanço de faísca ajustável CDI proposto, podemos ver um circuito IC 555 comum e um circuito IC 4017 que são manipulados em um modo padrão de “circuito de luz de perseguição de LED”.
O IC 555 é configurado como um astável que produz e alimenta pulsos de clock para o pino 14 do IC 4017, que por sua vez responde a esses pulsos e produz uma lógica alta de “salto” em suas pinagens de saída, começando do pino 3 ao pino 11 e depois de volta ao pino 3.
Alguns BJTs NPN/PNP podem ser vistos no lado esquerdo do diagrama, estes estão posicionados para redefinir os dois ICs em resposta aos sinais recebidos da bobina de captação da motocicleta.
O sinal da bobina de captação é alimentado na base do NPN, o que avisa os CIs para reiniciar e reiniciar as oscilações, cada vez que a bobina de captação detecta uma revolução completa pelo volante associado.
Otimizando a Frequência IC 555
Agora, a frequência do IC 555 é ajustada de tal forma que, no momento em que a bobina de captação detecta uma revolução e reinicializa os ICs, o IC 555 é capaz de produzir cerca de 9 a 10 pulsos, permitindo que o IC 4017 renderize um alto até seu pino # 11 ou pelo menos até sua pinagem#9.
O acima pode ser ajustado para rotações correspondentes à marcha lenta da motocicleta.
Isso significa que durante a marcha lenta os sinais da bobina de captação permitiriam que as saídas do 4017 percorressem quase todas as pinagens até serem redefinidas para o pino 3.
No entanto, agora vamos tentar simular o que aconteceria em velocidades mais altas.
Resposta em alta velocidade do veículo
Em velocidades mais altas, os sinais de pickup produziriam sinais mais rápidos do que o ajuste normal, e isso impediria o IC 555 de gerar os 10 pulsos estipulados, então pode ser que agora seja capaz de gerar cerca de 7 pulsos ou 6 pulsos em um dada maior velocidade do veículo.
Isso, por sua vez, impediria o IC 4017 de permitir que toda a sua saída fosse alta, em vez disso, agora ele seria capaz de conduzir apenas até o pino 6 ou 5, após o qual o pickup forçaria o IC a reiniciar.
Dividindo o volante em 10 divisões de avanço/retardo
A partir da discussão acima, podemos simular uma situação em que, em marcha lenta, as saídas do IC 4017 estão dividindo a rotação do volante do captador em 10 divisões, em que os 3 ou 4 sinais de pinagem inferiores podem ser considerados correspondentes aos sinais que podem ser ocorrendo logo antes do sinal real de disparo da bobina de captação, da mesma forma, a lógica de pinagem alta no pino # 2,4,7 pode ser simulada para ser os sinais que aparecem logo após o disparo real da bobina de captação ter passado.
Portanto, podemos assumir que os sinais nas pinagens inferiores do IC 4017 estão “avançando” os sinais de pickup reais.
Além disso, uma vez que o reset do captador empurra o IC 4017 para o alto do pino 3, esta pinagem pode ser considerada correspondente ao gatilho normal “recomendado” do captador …. enquanto as pinagens que seguem o pino 3, isto é as pinagens2,4,7 podem ser assumidas como sendo os sinais correspondentes aos sinais atrasados ou aos sinais “retardados”, em relação aos disparos de pickup reais.
Como configurar o circuito
Para isso, primeiro precisamos saber o tempo necessário para que o sinal de pickup gere cada pulso alternado.
Suponha que você grave em torno de 100 milissegundos (um valor arbitrário), isso implicaria que o 555 IC precisa produzir pulsos em seu pino 3 na taxa de 100/9 = 11,11 ms.
Uma vez definido, podemos assumir aproximadamente que as saídas do 4017 estão produzindo alta lógica em todas as suas saídas, que gradualmente “recuam” à medida que os sinais de captação se tornam cada vez mais rápidos em resposta à velocidade do veículo.
Isso induziria uma lógica “alta” recuando nas pinagens inferiores do IC 4017, portanto, em velocidades mais altas, o motociclista teria a opção de recorrer manualmente aos conjuntos de pinos inferiores para acionar a bobina CDI, conforme mostrado no diagrama (consulte opções da chave seletora).
Na figura podemos ver uma chave seletora que pode ser usada para selecionar os triggers de pinagem do IC 4017 IC para acionar a bobina CDI.
Como explicado acima, o conjunto inferior de lógicas altas de pinagem recuada, uma vez selecionado, permitiria um acionamento avançado da bobina CDI e, assim, permitiria ao piloto obter um disparo automático de avanço automático autoajustável da bobina CDI, no entanto, isso deve ser selecionado apenas quando o veículo está rodando muito acima da velocidade normal recomendada.
Da mesma forma, se o motociclista contemplar uma velocidade mais baixa para o veículo, ele pode alternar o interruptor para selecionar a opção de temporização “retardada”, disponível nas pinagens que estão logo após o pino 3 do IC 4017.
Durante as velocidades normais recomendadas, o motociclista pode optar pelo pino 3 como saída de disparo para o CDI, o que permitiria ao veículo desfrutar de um passeio eficiente nas velocidades normais dadas.
A teoria de temporização de avanço/retardo acima foi inspirada na explicação expressa no vídeo a seguir:
Segue abaixo o link do vídeo original que pode ser assistido no Youtube:
Como automatizar o conceito acima
Na seção a seguir, aprendemos o método de atualizar o conceito acima para uma versão automática usando um tacômetro e um estágio de circuito de opamp. A ideia foi solicitada pelo Sr. Mike e desenhada pelo Sr. Abu-Hafss.
Especificações técnicas
Saudações!
Coisas interessantes aqui, estou atualmente traçando traços em CAD e gostaria de gravar isso em algum PCB, mas eu preferiria ter a seleção de padrão avançado ou retardo deixado para a eletrônica …
Eu sou um pouco novo nisso, mas sinto que tenho uma boa compreensão dos conceitos em jogo …
minha pergunta é, existem artigos que você tem sobre automatizar a seleção avançada com base no RPM do motor? ah e uma lista de peças dos vários componentes seria espetacular???
Obrigado, mike
O Design, de Abu-Hafss
Olá Swagatam
Referindo-se ao seu artigo sobre avanço, retardo de ignição CDI para aumentar a eficiência de motocicletas de alta velocidade, gostaria de comentar que ainda não me deparei com nenhuma situação em que seja necessário RETARDAMENTO (ou mais precisamente DELAY) de disparo das faíscas. Como você mencionou, a maioria das bicicletas (bicicletas de corrida) não funciona em altas RPM (normalmente acima de 10.000 RPM), portanto, é necessário o disparo antecipado da faísca. Eu tinha quase a mesma ideia em minha mente, mas não pude testar fisicamente.
A seguir está minha adição proposta ao seu circuito:
Para automatizar a comutação da faísca de disparo entre NORMAL e ADVANCE, um circuito tacômetro pode ser usado com mais alguns componentes. O voltímetro do circuito do tacômetro é removido e a saída é alimentada no pino 2 do IC LM741, que é usado como comparador. Uma tensão de referência de 10V é atribuída no pino #3. O circuito do tacômetro é projetado para fornecer saída de 1V contra 1000RPM, portanto, 10V refere-se a 10.000RPM. Quando o RPM é superior a 10.000, o pino 2 tem mais de 10V e, portanto, a saída de 741 fica baixa (zero).
Esta saída está conectada à base do T2, portanto, a saída baixa liga o T2. Se o RPM estiver abaixo de 10.000, a saída fica alta e, portanto, o T2 desliga. Ao mesmo tempo, o T4, que está configurado como inversor de sinal, inverte a saída para baixo e o mesmo é conectado à base do T3, portanto, o T3 é ligado.
Cumprimentos
Abu-Hafss

Hashtags: #Circuito #AvançoRetardo #Centelha #CDI #Ajustável
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários