O post explica um controlador de motor DC que apresenta uma compensação de torque constante para permitir que o motor funcione a uma velocidade consistente, independentemente da carga nele.
Desvantagem dos controladores de velocidade comuns
Uma desvantagem da maioria dos controladores de velocidade simples é que eles apenas fornecem ao motor uma tensão constante predeterminada. Como resultado, a velocidade não permanece constante e varia com a carga do motor, devido à ausência de compensação de torque.
Por exemplo, em um modelo de trem, com controladores simples, a velocidade do trem diminui gradualmente para os gradientes de subida e acelera durante a descida.
Portanto, para os trens de modelo, o ajuste do controle do potenciômetro para manter uma velocidade selecionada do motor também se desvia dependendo da carga que o motor pode estar puxando.
O circuito controlador de velocidade do motor de torque constante explicado neste artigo elimina esse problema rastreando a velocidade do motor e mantendo-a constante para uma configuração de controle predeterminada, independentemente da carga no motor.
O circuito pode ser aplicado na maioria dos modelos que utilizam um motor DC de ímã permanente.
Calculando o fator EMF traseiro
A tensão nos terminais do motor é composta por alguns fatores, a força eletromotriz produzida pelo motor e a queda de tensão na resistência da armadura.
A contra-fem gerada pelo enrolamento do motor é normalmente proporcional à velocidade do motor, o que significa que a velocidade do motor pode ser monitorada medindo-se este conteúdo de contra-emf. Mas, o principal problema é isolar e detectar a fem traseira da tensão de resistência da armadura.
Supondo que um resistor separado seja conectado em série com o motor, considerando que uma única corrente comum passa por esse resistor e também pela resistência da armadura, a queda de tensão nos dois resistores em série pode ser equivalente à queda na resistência da armadura.
Na verdade, pode-se supor que quando esses dois valores de resistência são idênticos, as duas magnitudes de tensão em cada um dos resistores também serão semelhantes. Com esses dados, pode ser possível deduzir a queda de tensão de R3 da tensão do motor e obter o valor de volta emf necessário para o processamento.

Processando Back EMF para Torque Constante
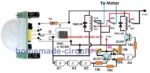
O circuito proposto monitora continuamente a força eletromotriz e regula a corrente do motor para garantir que, para um ajuste de controle de potenciômetro atribuído, a força eletromotriz, juntamente com a velocidade do motor, seja mantida em um torque constante.
Para facilitar a descrição do circuito, considera-se que P2 é ajustado e mantido em sua posição central, e o resistor R3 é selecionado como equivalente ao valor da resistência da armadura do motor.
Calculando a tensão do motor
A tensão do motor pode ser calculada somando a fem traseira Va com a queda de tensão na resistência interna do motor Vr.
Considerando que R3 diminui uma tensão Vr, a tensão de saída Vo será igual a Va + 2 V.
A tensão na entrada inversora (-) do IC1 será Va + Vr, e na entrada não inversora (+) será Vi + (Va + 2Vr – Vi) / 2
Como as duas magnitudes de tensão acima devem ser iguais, organizamos a equação acima como:
Va + Vr = Vi + (Va + 2Vr – Vi) / 2
Simplificando esta equação fornece Va = Vi.
A equação acima indica que a fem traseira do motor é mantida consistentemente no mesmo nível que a tensão de controle. Isso permite que o motor trabalhe com velocidade e torque constantes para qualquer configuração especificada do ajuste de velocidade P1.
P2 é incluído para compensar o nível de diferença que pode existir entre a resistência R3 e a resistência da armadura. Ele executa isso ajustando a magnitude do feedback positivo no amplificador operacional de entrada não inversora.
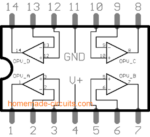
O amplificador operacional LM3140 basicamente compara a tensão desenvolvida através da armadura do motor com o equivalente de volta emf através do motor e regula o potencial de base do T1 2N3055.
T1 sendo configurado como seguidor de emissor regula a velocidade do motor de acordo com seu potencial base. Ele aumenta a tensão no motor quando uma força eletromotriz mais alta é detectada pelo amplificador operacional, resultando em um aumento na velocidade do motor e vice-versa.
T1 deve ser montado sobre um dissipador de calor adequado para um funcionamento adequado.
Como configurar o circuito
A configuração do circuito controlador de velocidade do motor de torque constante é feita ajustando P2 com o motor com carga variável até que o motor atinja um torque constante, independentemente das condições de carga.
Quando o circuito é aplicado para modelos de trens, deve-se tomar cuidado para não girar muito P2 em direção a P1, o que pode resultar na desaceleração do modelo, e, inversamente, P2 não deve ser girado demais na direção oposta, o que pode resultar na velocidade do trem realmente ficando mais rápido ao subir um gradiente para cima.
Hashtags: #Circuito #Controlador #Velocidade #Motor #Torque #Constante
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários