Um circuito que permite que um motor conectado opere no sentido horário e anti-horário por meio de acionadores de entrada alternativos é chamado de circuito controlador bidirecional.
O primeiro projeto abaixo discute um circuito controlador de motor bidirecional baseado em ponte completa ou ponte H usando os 4 opamps do IC LM324. No segundo artigo aprendemos sobre um circuito controlador de motor bidirecional de alto torque usando IC 556
Introdução
Geralmente, as chaves mecânicas são usadas para ajustar a direção de rotação de um motor CC. Ajustando a polaridade da tensão utilizada e o motor gira na direção oposta!
Por um lado, isso pode ter a desvantagem de que uma chave DPDT precisa ser adicionada para alterar a polaridade da tensão, mas lidamos apenas com uma chave que torna o procedimento bastante fácil.
No entanto, o DPDT pode ter um problema sério, não é recomendado que você inverta abruptamente a tensão em um motor CC durante seu movimento rotacional. Isso pode resultar em um pico de corrente, que pode queimar o controlador de velocidade associado.
Além disso, qualquer tipo de estresse mecânico também pode causar problemas semelhantes. Este circuito supera essas complicações facilmente. A direção e a velocidade são manipuladas com a ajuda de um potenciômetro solitário. Girar o potenciômetro em uma direção especificada faz com que o motor comece a girar.
A comutação do potenciômetro na direção oposta permite que o motor gire no movimento reverso. A posição do meio no potenciômetro desliga o motor, garantindo que o motor desacelere primeiro e depois pare antes que seja feito um esforço para mudar a direção.
Especificações técnicas
Voltagem: O circuito e o motor fazem uso da fonte de alimentação comum. Isso implica que, como a tensão de trabalho mais alta do LM324 é 32VDC, isso também se torna a tensão máxima acessível para operar o motor.
Atual: O MOSFET IRFZ44 foi projetado para 49A; o IRF4905 será capaz de lidar com 74A. No entanto, as trilhas de PCB que vão dos pinos MOSFET ao bloco de terminais de parafuso podem gerenciar apenas cerca de 5A. Isso pode ser melhorado soldando pedaços de fio de cobre sobre as trilhas do PCB.
Nesse caso, certifique-se de que os MOSFETs não fiquem muito quentes – se isso acontecer, dissipadores de calor maiores serão necessários para serem montados nesses dispositivos.
Pinagens LM324

CONTROLE BIDIRECIONAL DE MOTORES DC USANDO LM324
Fundamentalmente, você encontrará 3 maneiras de ajustar a velocidade dos motores DC:
1. Usando engrenagens mecanizadas para atingir a aceleração ideal: Essa abordagem é muitas vezes além da conveniência da maioria dos entusiastas que praticam em oficinas caseiras.
2. Diminuindo a tensão do motor através de um resistor em série. Isso pode ser certamente ineficiente (a potência será dissipada no resistor) e também resultar na redução do torque.
A corrente consumida pelo motor também aumenta à medida que a carga no motor aumenta. O aumento da corrente significa uma maior queda de tensão sobre o resistor em série e, portanto, uma queda de tensão para o motor.
O motor então faz um esforço para puxar uma quantidade ainda maior de corrente, fazendo com que o motor pare.
3. Ao aplicar toda a tensão de alimentação ao motor em pulsos curtos: Este método elimina o efeito de queda em série. Isso é conhecido como modulação por largura de pulso (PWM) e é a estratégia encontrada neste circuito. Pulsos rápidos permitem que o motor opere lentamente; pulsos estendidos permitem que o motor funcione mais rapidamente.

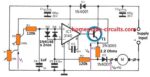
COMO FUNCIONA (consulte o esquema)
O circuito pode ser dividido em quatro etapas:
1. Controle do motor – IC1:A
2. Gerador de ondas triangulares – IC1:B
3. Comparadores de tensão – IC1:C e D
4. Acionamento do motor – Q3-6
Vamos começar com o estágio do driver do motor, centrado nos MOSFETs Q3-6. Apenas alguns desses MOSFETs permanecem no estado ativado a qualquer instante. Enquanto Q3 e Q6 estão ligados, a corrente se move através do motor e faz com que ele gire em uma única direção.
Assim que Q4 e Q5 estão em condição de operação, a circulação de corrente é invertida e o motor começa a girar no sentido oposto. IC1:C e IC1:D lidam com quais MOSFETs estão ligados.
Opamps IC1:C e IC1:D são conectados como comparadores de tensão. A tensão de referência para esses opamps é produzida pelo divisor de tensão do resistor de R6, R7 e R8.
Observe que a tensão de referência para IC1:D está ligada à entrada ‘+' mas para IC1:C está ligada à entrada ‘-‘.
Isso significa que IC1:D é ativado com uma tensão maior que sua referência, enquanto IC1:C é acionado com uma tensão menor que sua referência. Opamp IC1:B é configurado como um gerador de onda triangular e fornece o sinal de ativação para os comparadores de tensão relevantes.
A frequência é aproximadamente o inverso da constante de tempo de R5 e C1 – 270Hz para os valores empregados.
Diminuir R5 ou C1 aumenta a frequência; aumentar qualquer um deles reduzirá a frequência. O nível de saída pico a pico da onda triangular é muito menor que a diferença entre as duas referências de tensão.
Portanto, é extremamente difícil que ambos os comparadores sejam ativados ao mesmo tempo. Ou então todos os 4 MOSFETs começariam a conduzir, levando a um curto-circuito e arruinando todos eles.
A forma de onda triangular é estruturada em torno de uma tensão de deslocamento CC. Aumentar ou diminuir a tensão de compensação varia a posição do pulso da onda triangular apropriadamente.
A comutação da onda triangular para cima permite que o comparador IC1:D seja ativado; diminuindo isso resulta na ativação do comparador IC1:C. Quando o nível de tensão da onda triangular está no meio das duas referências de tensão, nenhum dos comparadores é induzido. A tensão de deslocamento CC é regulada pelo potenciômetro P1 via IC1:A, que é projetado como seguidor de tensão.
Isso fornece uma fonte de tensão de baixa impedância de saída, permitindo que a tensão de deslocamento CC seja menos vulnerável ao impacto de carga de IC1:B.
À medida que o ‘pot' é comutado, a tensão de deslocamento CC começa a variar, para cima ou para baixo, com base na direção em que o potenciômetro é invertido. O diodo D3 apresenta proteção de polaridade reversa para o controlador.
O resistor R15 e o capacitor C2 são um filtro passa-baixa simples. Isso serve para limpar quaisquer picos de tensão causados pelos MOSFETs à medida que eles ligam a alimentação do motor.
Lista de peças

2) Controle de Motor Bidirecional usando IC 556
O controle de velocidade e bidirecional para motores DC é relativamente simples de implementar. Para motores energizados independentemente, a velocidade é, em princípio, uma função linear da tensão de alimentação Motores com ímã permanente são uma subcategoria de motores energizados independentemente e são frequentemente usados em brinquedos e modelos.
Neste circuito, a tensão de alimentação do motor é variada por meio da modulação por largura de pulso (PWM) que garante boa eficiência, bem como um torque relativamente alto em baixas velocidades do motor. Uma única tensão de controle entre 0 e +10 V permite que a velocidade do motor seja revertida e variada de zero a máximo em ambas as direções.
O IC multivibrador astável é configurado como um oscilador de 80 Hz e determina a frequência do sinal PWM. A fonte de corrente T1 carrega Ca. A tensão dente de serra neste capacitor é comparada com a tensão de controle em 1C2, que emite o sinal PWM para o buffer N1-Na ou NPN1. O driver do motor baseado em darlington é um circuito de ponte capaz de conduzir cargas de até 4 A, desde que a corrente de entrada permaneça abaixo de 5 A e seja fornecido resfriamento suficiente para os transistores de potência T1 -Ts. Os diodos D1, D5 oferecem proteção contra surtos indutivos do motor O interruptor S1 possibilita a inversão instantânea da direção do motor.

Imagens de protótipo



Hashtags: #Circuitos #Simples #Controlador #Motor #Bidirecional #Explorados
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários