Neste post estudamos como fazer um circuito de carro de brinquedo simples operado por palmas usando um circuito de interruptor de palmas e um amplificador de MIC, para controlar seus movimentos de avanço e retrocesso, em resposta às palmas do usuário. A ideia foi solicitada pelo Sr. Zeeshan.
Este carro de brinquedo operado por palmas se moverá para frente ou para trás toda vez que um som de palmas for gerado.
Objetivos e Requisitos do Circuito
- Preciso urgentemente de um diagrama de circuito. Eu preciso de um circuito de um carro de brinquedo que vá para frente e para trás ao som de palmas.
- Depois de ligar, o carro avança (o motor gira no sentido horário).
- Depois que um carro de som bate palmas vai para trás (o motor gira no sentido anti-horário). e vice-versa.
- Em outras palavras, o motor do brinquedo muda sua rotação do sentido horário para o anti-horário e vice-versa pelo som de palmas. Se possível faça usando 3 ou menos células aaa de lápis.
- Se sim, por favor me ajude, fornecendo-me assim.
O design
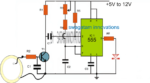
A ideia solicitada acima de um circuito de carro de brinquedo operado por palmas pode ser implementada usando o seguinte circuito simples:

O circuito é composto por três estágios básicos: o estágio do amplificador MIC, o estágio do comparador de opamp e um estágio de flip-flop baseado em IC 4017.
O IC 741 é configurado como um comparador e, juntamente com o IC 4017, forma um circuito básico de comutação operado por palmas.
O BC557/BC547 constitui o circuito amplificador MIC, usamos dois transistores aqui para tornar o design altamente sensível aos sons de palmas.
Sempre que um som de palmas ou qualquer som semelhante é detectado pelo MIC, ele conduz instantaneamente e causa um sinal baixo em seus terminais, permitindo que o BC557 seja acionado.
O disparo do BC557 força o BC547 a conduzir ainda mais forte e, no curso, leva o pino 2 do IC 741 ao nível do solo ou abaixo do pino de referência do pino 3 do IC. Esta ação permite que a saída do opamp seja alta, causando um disparo positivo para o pino 14 de entrada 4017.
O funcionamento acima força o IC 4017 a mudar de estado em seus pinos de saída #2 e pino #3 alternadamente com cada detecção de som de palmas.
A saída do IC 4017 pode ser vista conectada a um estágio de driver de relé que consiste em um relé DPDT com seus contatos duplos configurados com os motores dos carros de brinquedo e os trilhos de alimentação.
A ação do flip-flop da saída do IC 4017 alterna os contatos do relé em seus pontos N/C e N/O, fazendo com que o motor do carro gire correspondentemente no sentido anti-horário e no sentido anti-horário em resposta aos sons de palmas subsequentes e, portanto, o carro é capaz de se mover para frente ou para trás de acordo.
Para fazer este circuito de brinquedo operado por palmas, certifique-se de conectar os contatos de relé indicados em ambos os motores do carro que podem ser fixados na parte frontal ou traseira da unidade e deve ter uma caixa de engrenagens configurada com as rodas.
Hashtags: #Circuito #carro #brinquedo #operado #por #palmas
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários