Neste post, aprendemos como fazer um circuito simples de cadeira de rodas elétrica usando um circuito de driver de motor BLDC padrão e alguns motores BLDC de alta potência.
Introdução
A introdução da cadeira de rodas elétrica foi como uma bênção para nossos muitos amigos com deficiências que agora acham muito mais fácil se mover e viajar, sem esforço, com apenas um botão.
A única parte cara e complicada em um projeto de cadeira de rodas são seus cálculos ergonômicos e a eficiência do mecanismo da roda, enquanto a eletrônica para controlar o sistema parece ser comparativamente menos cara e complexa.
Se um fabricante tiver acesso ao design ergonômico mais eficaz da cadeira de rodas, a criação da seção elétrica/eletrônica do sistema pode ser implementada rapidamente, implementando as etapas conforme explicado na explicação a seguir.
Especificações
Para fazer um circuito de cadeira de rodas elétrica, os principais componentes necessários para isso podem ser conforme a lista a seguir:
1) Motores BLDC – 2nos (250 watts cada)

2) Montagem do corpo da cadeira de rodas
3) Circuito Driver BLDC
4) Bateria de Ciclo Profundo ou preferencialmente Li-ion – 2nos cada 24V 60AH

Exceto o circuito do driver BLDC, o resto dos materiais podem ser adquiridos prontos no mercado.
Embora eu tenha apresentado muitos circuitos de driver BLDC neste site, estarei selecionando aquele que parece mais promissor e eficaz devido às suas características flexíveis em termos de especificações do motor e capacidade de manuseio de energia.
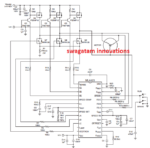
No último post, discuti um circuito de driver BLDC relativamente simples, mas universal, usando o IC ML4425, e empregarei o mesmo design para o nosso atual circuito de driver de motor de cadeira de rodas elétrica.
Devido às suas especificações sem sensor, o circuito permite incorporar qualquer tipo de motor trifásico, independentemente de ter ou não sensores, e sem nenhuma restrição ao limite de corrente (Amp) necessário para acionar o motor.
O esquema completo pode ser visto na imagem a seguir:
Diagramas de Circuito

As especificações técnicas para o driver BLDC sem sensor acima já foram explicadas em nosso post anterior, portanto, você pode consultar o mesmo para aprender os detalhes em profundidade.
Os controles são realmente muito fáceis e permitiriam controle e manobras sem esforço para o usuário que opera a cadeira de rodas.
O interruptor RUN/BRAKE pode ser um único interruptor DPDT para serviço pesado que pode ser usado pelo operador para parar instantaneamente a cadeira de rodas, sempre que necessário.
A velocidade do circuito da cadeira de rodas pode ser controlada simplesmente deslizando o botão R18 no sentido horário/anti-horário. Este pote deve ser de muito boa qualidade, de preferência do tipo multi-voltas, conforme mostrado abaixo.
Especificações do potenciômetro

A tensão de alimentação tem uma ampla faixa, começando de 24V a 80V, o que significa que mais baterias poderiam ser conectadas em série para operar motores de maior tensão, o que por sua vez permitiria ao fabricante incorporar motores e baterias de menor porte, garantindo cadeiras de rodas compactas e mais leves .
Ambos os motores acoplados às rodas traseiras podem ser unidos em paralelo e acionados usando o circuito de acionamento BLDC mostrado acima.
Se você tiver alguma dúvida específica sobre o circuito de cadeira de rodas elétrica explicado acima usando o motor BLDC, não hesite em expressá-las através da caixa de pesquisa abaixo.
ATUALIZAR:
O design acima não possui o recurso crucial de reversão do motor, um design aprimorado com um recurso de reversão pode ser encontrado na seguinte folha de dados em pdf:
https://www.homemade-circuits.com/wp-content/uploads/2018/04/BLDC-driver.pdf
Videoclipe:
Hashtags: #Cadeira #rodas #elétrica #usando #motor #BLDC
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários