Neste post vamos aprender o que é o servo motor, como ele funciona, como fazer a interface com o microcontrolador e o que torna este motor especial de outros motores.
Sendo um entusiasta da eletrônica, teríamos encontrado muitos tipos de motores, aqui vamos dar uma olhada no tipo especial de motor chamado servo motor.
O que é um Servomotor?
Servo motor ou simplesmente servo é um tipo especial de motor projetado para controle preciso sobre posição, aceleração e velocidade. Ao contrário de todos os outros tipos de motor, o servo só pode girar 180 graus bidirecional. Possui engrenagens mecânicas e batente que limitam a rotação angular do servo.
Servo motor típico:

Os servo motores são usados em robótica, câmeras de CFTV, carros RC, barcos, aviões de brinquedo etc. Os servos são usados onde não há necessidade de movimento rotatório contínuo, mas trava em uma posição específica ou move alguma carga com velocidade controlada dentro do limite angular móvel.
Servo não é simplesmente um motor como outros tipos, mas é um módulo, que combina um motor DC/AC normal, um grupo de engrenagens, eletrônica de controle e um sistema de feedback. Vejamos cada uma das etapas mencionadas em detalhes.
O motor DC/AC que é empregado em um servo módulo pode ser motor sem escova ou escovado, na maioria dos servos de hobby o motor DC é usado e os motores AC são usados em aplicações industriais. O motor dá entrada rotacional ao servo. O motor gira a várias centenas de RPM dentro do servo e a rotação de saída é cerca de 50 ou mais vezes menor que sua RPM.
A próxima etapa é a montagem da engrenagem, que controla a rotação angular e a velocidade do servo. A engrenagem pode ser feita de plástico ou metal, dependendo de quão volumosa é a carga. Geralmente os motores DC são executados em alta rotação e baixo torque; o conjunto da engrenagem converterá o excesso de RPM em torque. Assim, um pequeno motor pode lidar com uma carga enorme.
A próxima etapa é a eletrônica de controle que consiste em MOSFETs e CIs para controlar a rotação do motor. Um sistema de feedback está sempre presente nos servomotores para rastrear a posição atual do atuador.
Em servos geralmente um componente de feedback é um potenciômetro, que é conectado diretamente ao atuador rotativo. O potenciômetro atua como divisor de tensão que é alimentado para a eletrônica de controle. Esse feedback ajuda a eletrônica de controle para determinar a quantidade de energia fornecida ao motor.
Um servo motor em uma posição fixa irá relutantemente se mover de sua posição atual se alguma força externa tentar perturbar. O sistema de feedback monitora a posição atual e alimenta o motor contra distúrbios externos.
O cenário acima é o mesmo quando o servo está movendo seu atuador. O sistema de controle compensará a força externa e se moverá em determinada velocidade.
Até agora você sabe um pouco sobre servo motor e seu mecanismo de funcionamento. Vamos ver como controlar os servo motores usando microcontrolador.
Os servomotores possuem 3 terminais ao contrário de outros motores que possuem 2 terminais, dois para alimentação (5V nominal) e um para sinal de controle. Os fios são coloridos para facilitar a identificação dos terminais.
Os sinais de controle dos servos são PWM na frequência de 50Hz. A largura de pulso do sinal determina a posição do braço do atuador. Um servo motor típico de hobby opera de 1 a 2 milissegundos de largura de pulso.
A aplicação de um sinal de controle de largura de pulso de 1 ms manterá o atuador na posição de 0 graus. A aplicação de sinal de controle de largura de pulso de 2 ms manterá o atuador na posição de 180 graus. A aplicação de sinais entre 1-2 ms manterá o atuador dentro de um ângulo de 0-180 graus. Isso pode ser melhor entendido pela imagem abaixo.

Até agora você já deve ter entendido como um servo é controlado pela modulação por largura de pulso (PWM).
Agora vamos aprender como fazer a interface de um servo motor com o Arduino.
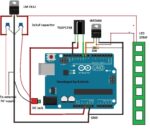
Diagrama de circuito:

A fiação é fácil e auto-explicativa. Você precisa de uma fonte de alimentação externa se estiver usando um servo motor volumoso. Se você tentar se alimentar da fonte de alimentação do arduino, acabará sobrecarregando a porta USB do computador.
Se você tem um servo similar que está ilustrado no início do artigo, então você pode alimentá-lo a partir da fonte arduino 5V, também mostrada no protótipo do autor.
Protótipo do autor:

O Arduino precisa da biblioteca servo para manuseá-lo, facilitou nossa tarefa e já está na IDE do Arduino.
Programa:
//--------Program developed by R.Girish--------//
#include
Servo motor;
int pos = 0;
int t=10;
void setup()
{
motor.attach(7);
}
void loop()
{
A:
pos=pos+1;
motor.write(pos);
delay
Hashtags: #Como #fazer #interface #servomotores #Arduino
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc...
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários
Mas se gostou compartilhe!!!