O post explica uma partida automática da bomba submersível, circuito de parada com proteção contra funcionamento a seco para implementar uma comutação automática de LIGA/DESLIGA do motor em resposta aos níveis de água altos/baixos do tanque superior.
Conceito de circuito
Em um dos posts anteriores, aprendemos um conceito semelhante que também lidava com uma função de partida/parada automática do botão do contator da bomba submersível, no entanto, como aqui os sensores envolviam interruptores de bóia, o design parecia um pouco complexo e não adequado para todos.
Além disso, a proteção contra funcionamento a seco incluída no projeto dependia da mudança de temperatura do motor para executar a proteção necessária do motor. Esse recurso também não era muito desejável para um leigo, pois a instalação do sensor de calor sobre o motor subterrâneo não era fácil.
Neste post, tentei eliminar todos esses aborrecimentos e projetei um circuito que detecta a presença de água apenas por meio de sensores de metal imersos nas fontes de água relevantes.
Operação do Circuito
Vamos entender a proposta de partida automática da bomba submersível, circuito de parada com proteção contra funcionamento a seco.

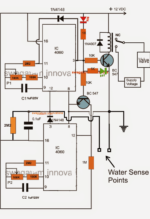
Um único IC 4049 pode ser visto engajado para todo o sensoriamento, ações de partida e parada e execução da proteção contra funcionamento a seco.
As portas envolvidas aqui são 6 portas NOT do IC 4049 que são basicamente manipuladas como inversores (para inverter a polaridade da tensão alimentada em sua entrada).
Vamos supor que a água dentro do tanque superior fique abaixo do limite inferior desejado, conforme indicado no diagrama acima.
A situação retira o potencial positivo que foi fornecido através da água para a entrada de N1. N1 responde a isso fazendo com que um positivo apareça em seu pino de saída, o que instantaneamente faz com que C1 comece a carregar via R2.
A condição acima também permite que o positivo da saída de N1 alcance a entrada de N2, que por sua vez produz um baixo ou um negativo na base de T1 via R3…. o relé associado agora liga e ativa o “START ” botão do contator …. no entanto, a ativação do relé é sustentada apenas por um segundo ou mais até que C1 esteja totalmente carregado, este comprimento pode ser definido ajustando adequadamente os valores de C1/R2.
Por enquanto, vamos esquecer os estágios N5/N6 que estão posicionados para a implementação da proteção contra funcionamento a seco.
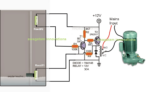
Vamos supor que a bomba esteja funcionando e despejando água no tanque OH mostrado.
A água agora começa a encher dentro do tanque, até que o nível atinja a borda do tanque “beijando” o sensor correspondente à entrada N3.
Isso permite que um positivo através da água alimente a entrada de N3, permitindo que sua saída seja baixa (negativa), o que instantaneamente faz com que C2 comece a carregar via R5, mas no processo a entrada de N4 também se torna baixa e sua saída inverte para um alto solicitando que o driver do relé ative o relé.
O relé superior é ativado instantaneamente, mas apenas por um segundo, alternando o botão “STOP” do contator e parando o motor da bomba. A temporização do relé pode ser ajustada ajustando adequadamente os valores de C2/R5.
A explicação acima cuida do controle automático do nível de água, alternando o botão start/stop submersível através dos relés do circuito. Agora pode ser interessante aprender como a proteção contra funcionamento a seco é projetada para evitar um risco de funcionamento a seco na ausência de água dentro do poço ou de um tanque subterrâneo.
Vamos voltar para a situação inicial quando a água no OHT caiu abaixo do limite inferior e rendeu um baixo na entrada de N1….o que também rende um baixo na entrada N5.
A saída N5 fica alta devido a isso e fornece uma alimentação positiva para C3 para que ele possa começar a carregar.
No entanto, como o processo também deve iniciar o motor, se houver água, a bomba pode começar a despejar água na OHT, que deve ser detectada pela entrada de N6, fazendo com que sua saída diminua.
Com a saída de N6 em baixa, C3 é inibido de carregar, e a situação permanece impasse… e o motor continua bombeando água sem alteração nos procedimentos explicados anteriormente.
Mas, suponha que o motor experimente um funcionamento a seco devido à ausência de água no poço …. como mencionado acima, C3 começa a carregar e a saída de N6 nunca se torna negativa para impedir que C3 carregue totalmente …. portanto, C3 é capaz para completar seu carregamento dentro de um intervalo de tempo predeterminado (decidido por C3/R8) e, finalmente, produzir um alto (positivo) na entrada N3.
N3 responde a isso da mesma forma que faria quando a água no tanque é detectada no limite superior…. solicitando a comutação do relé superior e parando o motor de funcionar mais.
A proteção contra funcionamento a seco para o circuito de partida e parada da bomba submersível discutida é assim executada.
Lista de peças
- R1,R4,R9 = 6M8
- R3,R7,R6 = 10K
- R8 = 100K
- R2,R5,C1,C2,C3 = a ser determinado com experimentação
- N1——N6 = IC 4049
- TODOS OS DIODOS = 1N4007
- RELÉS = 12V, 10AMP
- T1 = BC557
- T2 = BC547
Hashtags: #Circuito #partidaparada #bomba #submersível
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários