O post explica um circuito de partida suave de motor PWM eficaz que pode ser usado para habilitar motores pesados com partida suave e, assim, evitar que o equipamento consuma altas correntes perigosas.
Por que uma partida suave
Motores de alta potência, como motores de bomba ou outras formas de motores industriais pesados, tendem a consumir uma corrente enorme durante o seu interruptor inicial, o que, por sua vez, afeta os fusíveis e interruptores associados, fazendo com que eles queimem ou se degradem ao longo do tempo. Para remediar a situação, um circuito de partida suave torna-se altamente imperativo.
Em alguns dos meus artigos anteriores, discutimos sobre um tópico relacionado, que você pode aprender de forma abrangente através dos seguintes posts:
Circuito de partida suave para motores de bombas
Circuito de partida suave para refrigeradores
Embora os designs acima sejam bastante úteis, eles podem ser considerados de baixa tecnologia com sua abordagem.
Neste artigo, veremos como o processo pode ser implementado usando um circuito controlador de partida suave do motor baseado em PWM muito sofisticado.
Usando o conceito PWM
A idéia aqui é aplicar um PWM de incremento gradual a um motor cada vez que ele é ligado, esta ação permite que o motor atinja uma velocidade linearmente crescente de zero ao máximo dentro de um período de tempo estipulado, que pode ser ajustável.

Nota: Por favor, use uma configuração Darlington BC547 no pino 5 do IC2 em vez de um único BC547. Isso produzirá uma resposta mais eficaz em comparação com um único BC547
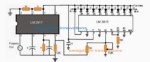
Circuito de exemplo para um controlador de motor variável de 48V com partida suave

Como funciona
Com referência à figura acima, a produção do PWM de incremento linear é obtida com a ajuda de dois 555 IC, configurados em seu modo PWM padrão.
Já discuti o conceito de forma elaborada em um dos meus artigos anteriores explicando como usar o IC 555 para gerar PWM.
Como pode ser observado no diagrama, a configuração emprega dois ICs 555, sendo o IC1 conectado como astável, enquanto o IC2 é um comparador.
IC1 gera os sinais de clock necessários em uma determinada frequência (determinada pelos valores de R1 e C2) que é aplicada ao pino 2 do IC2.
O IC2 utiliza o sinal de clock para gerar ondas triangulares em seu pino 7, para que possam ser comparadas com o potencial disponível em seu pino 5 de tensão de controle.
O pino 5 adquire a tensão de controle necessária através de um estágio seguidor de emissor NPN feito com a ajuda de T2 e os componentes associados.
Quando a alimentação é ligada, T2 é alimentado com uma tensão de rampa ou aumento gradual em sua base via R9, e devido ao carregamento proporcional de C5.
Este potencial de rampa é duplicado apropriadamente através do emissor de T2 em relação à tensão de alimentação em seu coletor, o que significa que os dados de base são convertidos em um potencial gradualmente crescente que varia de zero a quase o nível de tensão de alimentação.
Esta tensão de rampa no pino 5 do IC 2 é instantaneamente comparada com a onda triangular disponível no pino 7 do IC2, que é traduzida em um PWM de incremento linear no pino 3 do IC2.
O processo de incremento linear dos PWMs continua até que C5 esteja totalmente carregado e a base de T2 atinja um nível de tensão estável.
O design acima cuida da geração PWM cada vez que a energia é ligada.
Videoclipe:
O vídeo a seguir mostra um resultado de teste prático do circuito PWM acima implementado em um motor de 24 Vcc. O vídeo mostra a resposta do ajuste do potenciômetro PWM do circuito no motor, e também uma resposta adicional do LED indicador da bateria enquanto o motor está ligado e desligado.
Integrando um controlador Triac de cruzamento zero
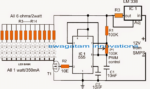
Para implementar o efeito do circuito de partida suave do motor PWM, a saída do pino 3 do IC2 deve ser aplicada a um circuito de acionamento de energia triac, conforme mostrado abaixo:

A imagem acima mostra como o controle PWM de partida suave da chave ON pode ser implementado em motores pesados para a finalidade pretendida.
Na imagem acima, vemos como isoladores de driver triac com detector de cruzamento zero podem ser empregados para acionar os motores com os PWMs de incremento linear para executar um efeito de partida suave.
O conceito acima cuida efetivamente da sobrecorrente de partida ON em motores monofásicos.
No entanto, caso seja usado um motor trifásico, a seguinte ideia pode ser usada para implementar a partida suave trifásica proposta em motores.

Hashtags: #Circuito #partida #suave #motor #PWM #para #evitar #alto #consumo #durante #chave #alimentação #LIGADA
FONTE
Nota: Este conteúdo foi traduzido do Inglês para português (auto)
Pode conter erros de tradução
Olá, se tiver algum erro de tradução (AUTO), falta de link para download etc…
Veja na FONTE até ser revisado o conteúdo.
Status (Ok Até agora)
Se tiver algum erro coloque nos comentários