O post explica um método que provavelmente pode ser usado para melhorar a capacidade de um sensor infravermelho passivo de detectar até mesmo uma presença humana estática ou estacionária. Este recurso normalmente não é possível com os sensores PIR convencionais.
Como o PIR detecta a presença humana
Eu já discuti muitas aplicações de detectores de movimento baseadas em PIR neste site, no entanto, todas essas aplicações exigem que a presença humana esteja constantemente em movimento para manter o PIR detectando sua presença, isso parece ser uma grande desvantagem que impede essas unidades de detectar uma ocupação humana constante ou estacionária.
No entanto, a desvantagem explicada acima tem uma razão por trás disso. Os sensores PIR convencionais funcionam detectando os sinais IR de um corpo humano através de alguns slots paralelos em suas lentes frontais, e seu circuito interno é ativado apenas quando os sinais IR cruzam entre esses slots de detecção (“visões”).
O cruzamento de sinais IR através dos slots de detecção permite que o circuito PIR traduza a informação em dois pulsos alternados correspondentes, que por sua vez são retificados para gerar a tensão de disparo no pino de saída do PIR.
PIR não pode detectar alvo de papel de carta
Isso implica que, se a fonte IR estiver imóvel, ela não solicitará que o módulo PIR produza qualquer disparo em seu pino de saída. Isso também implica que o sinal IR da fonte deve, de alguma forma, continuar cruzando os slots de detecção PIR fornecidos para permitir que ele detecte um determinado ser humano dentro da zona.
Parece que não há remédio direto ou simples para isso, porque os módulos PIR não podem ser modificados internamente para isso, o que impede a unidade de detectar a presença humana estacionária.
No entanto, uma observação lógica nos diz que, se for uma fonte de IR variável que pode ser necessária para manter o módulo PIR ativado, por que não forçar o próprio PIR a estar em movimento constante em vez do sujeito.
O conceito pode ser visualizado a partir da seguinte simulação GIF, que mostra um módulo PIR oscilante e um ser humano estático na zona de detecção.

Aqui podemos ver como um PIR oscilante se adapta ao problema e se transforma, permitindo a detecção de assuntos IR estáticos mesmo.
Isso se torna possível porque, por meio de seu movimento, o módulo PIR transforma a fonte IR estacionária em uma imagem IR em constante mudança em seus dois slots de recepção.
Embora a ideia pareça complexa, ela pode ser resolvida simplesmente usando um circuito de motor controlado por PwM de oscilação lenta.
Aprenderemos todo o mecanismo e os detalhes do circuito nas seções a seguir.
Como já discutimos, os módulos PIR convencionais são capazes de detectar apenas objetos vivos em movimento e não podem identificar um alvo estacionário, o que torna sua aplicação limitada apenas como detector de movimento humano.
Para aplicações em que a detecção de ocupação humana imóvel se torna necessária em tais cenários, um PIR convencional pode se tornar inútil e pode exigir algum arranjo externo para atualização.
Projetando PIR para detectar alvos imóveis
Na seção acima, aprendemos que, em vez de precisar que o alvo esteja em movimento, o módulo PIR pode ser movido em um determinado raio para implementar a detecção de alvo estático desejada.
Nas seções seguintes aprendemos sobre um mecanismo de circuito simples que pode ser usado com um PIR montado sobre um pequeno motor DC para as oscilações propostas.
O driver do motor controlado por PWM/Flip Flop
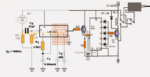
O sistema basicamente requer uma determinação de velocidade controlada por PWM e uma comutação de flip-flop para o motor. O diagrama a seguir mostra como esses recursos podem ser atribuídos ao motor PIR com a ajuda de um circuito simples:

O circuito mostrado utiliza um único IC HEF40106 hex inversor porta schmitt IC que inclui 6 portas NOT inversoras.
As portas N1 e N2 são configuradas para produzir uma saída PWM ajustável que é alimentada às portas N4, N5, N6 que formam os buffers.
A saída comum dessas portas de buffer é terminada na porta de um mosfet de driver de motor.
O conteúdo PWM é ajustado com a ajuda de P1, que é finalmente aplicado ao motor conectado através de um conjunto de contatos de relé DPDT.
Esses contatos de relé determinam a direção do movimento do motor (horário ou anti-horário).
Os contatos do relé DPDT do flip-flop são controlados por um temporizador astável configurado em torno da porta N3, em que o capacitor C3/R3 determina a que taxa o relé precisa mudar para permitir que o motor mude sua direção de rotação de forma consistente.
O projeto acima permite que o motor execute o movimento oscilante lento de ida e volta necessário em uma determinada zona radial.
C3 pode ser selecionado para iniciar a comutação a cada 5 a 6 segundos, e o PWm pode ser ajustado para permitir um movimento do motor extremamente lento, porque ele só precisa garantir que os slots do PIR cruzem os sinais IR do alvo em uma forma oportuna.
No entanto, como a operação do motor é lenta, a saída do PIR precisará ser sustentada por um temporizador de atraso OFF para que a carga conectada não desligue e ligue enquanto o movimento do motor corta alternadamente as linhas IR da ocupação humana.
O temporizador de atraso
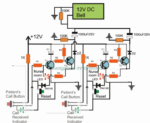
O seguinte estágio do circuito do temporizador de atraso pode ser usado, garantindo que cada vez que a saída PIR produz o pulso detectado, o atraso do temporizador seja estendido por 5 a 10 segundos e a carga conectada nunca seja interrompida durante o processo.

Na configuração acima, podemos ver o motor que recebe sua alimentação de acionamento elétrico do estágio PWM/flip flop conforme discutido no parágrafo anterior.
O fuso do motor pode ser visto acoplado a um eixo horizontal sobre o qual o PIR é fixado, de modo que quando o motor se move, o PIR passa por um movimento radial de vai e vem correspondentemente variável.
Enquanto o movimento PIR acima é induzido, os sinais IR de um alvo estacionário na zona são detectados na forma de pulsos alternados curtos, que são gerados no pino de saída do PIR indicado com o fio azul.
Esses pulsos são aplicados através do capacitor de 1000uF que carrega com cada pulso e garante que o BC547 seja mantido no modo de condução sem interrupção durante o processo.
O driver do relé que compreende o estágio BC557 responde ao sinal estável acima do coletor BC547 e, por sua vez, mantém o relé ligado, desde que o PIR continue detectando a presença humana.
A carga do relé fica assim acionada continuamente devido à presença de um ser humano estacionário na área.
No entanto, caso a ocupação humana seja removida ou quando o alvo se afastar da zona, o estágio do temporizador de atraso mantém o relé e a carga ativados por 5 a 10 segundos estipulados, após os quais ele desliga permanentemente, até que a zona seja novamente capturada por uma fonte potencial de emanação de IR.
Lista de peças
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K POTE
- D1, D2 = 1N4148
- D3 = MUR1560
- C1,C2 = 0,1uF/100V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1—N6 = IC MM74C14
- DPDT = INTERRUPTOR DPST OU RELÉ DPDT
- R3, C3 a ser determinado por alguma tentativa e erro
ATUALIZAR:
O circuito PIR explicado acima para detectar a presença humana estática pode ser muito simplificado empregando um circuito de chopper de sinal, conforme descrito na seguinte simulação GIF:
Uma inspeção cuidadosa mostra que, na verdade, um movimento oscilatório simplesmente não é necessário, o motor e a lâmina do cortador podem girar livremente mantendo a velocidade do motor em um nível mais baixo.
Isso também realizaria efetivamente a operação de detecção PIR estática pretendida.

Demonstração em vídeo provando a detecção humana estática para um PIR